
Astar算法求解迷宫最短路 | Python实现
实验内容
给定一个二维数组模拟迷宫,0表示允许通过,1表示有障碍无法通过。
给定一个起点(x0, y0)和终点(x1, y1),设计两种不同估价函数的A*算法,找到从起点走到终点的路径。
输入
Problem2.txt
- 第一行给入口坐标
x0, y0 - 第二行给出口坐标
x1, y1 - 下面
n行给一个n*m的0-1矩阵,表示迷宫
1,1
5,5
0 0 0 0 0
1 0 1 0 1
0 0 1 1 1
0 1 0 0 0
0 0 0 1 0
输出
Astar.txt
- 共需要多少步
- 路径坐标序列
共需13步
(1,1)-(1,2)-(2,2)-(3,2)-(3,1)-(4,1)-(5,1)-(5,2)-(5,3)-(4,3)-(4,4)-(4,5)-(5,5)
Astar算法
原理简介
A*算法是一种求解最短路径的直接搜索方法,是许多其他问题的常用启发式算法。
算法的核心公式$f(n) = g(n) + h(n)$
- f(n)是从初始状态经由状态n到目标状态的代价估计,简写为F
- g(n)是在状态空间中从初始状态到状态n的实际代价,简写为G
- h(n)是从状态n到目标状态的最佳路径的估计代价,简写为H
通过计算这三个值,我们可以找到更具有更高尝试价值的路径。
会有两个数组来存储一些结点
open list:待检查的结点列表,路径可能经过,也可能不经过close list:已经检查完毕的结点列表
搜索过程
- 把起点加入
open list - 循环
- 遍历
open list,查找F值最小的结点,把它作为当前要处理的结点 - 把这个结点移到
close list - 遍历当前这个结点四周的八个结点
- 如果结点不可达或者它已经在
close list中,就忽略 - 如果它不在
open list中,就加入open list中,并且把当前的结点设置成它的父节点,记录该结点的F, G, H值 - 如果它已经在
open list中,检查这条路径是否更好,以G值作为参考。G值越小表示路径越好。如果更好,就把它的父结点设置成当前的方格,并且重新计算G和F值。
- 如果结点不可达或者它已经在
- 退出循环的情况
- 终点已经在
open list中,说明已经找到了路径 open list为空,表示已经没有路可以走了
- 终点已经在
- 遍历
- 保存路径
数据结构
为了方便记录每个点的父节点以及计算F, G, H值,需要自己定义一个结点类
class Node:
-
定义结点类的构造方法
def __init__(self, x, y): self.pre = None self.x = x self.y = y self.update() -
更新启发函数的值
-
首先计算H的值,有两种方式
-
当前结点到目标结点的曼哈顿距离
abs(node.x - target[0])+abs(node.y - target[1]) -
当前结点到目标结点的欧式距离
(node.x - target[0])**2+(node.y - target[1])**2
-
-
再计算G的值,即深度,这里指当前走的步数
-
最后计算启发函数的值,F = G + H
# 更新启发函数的值 def update(self): self.update_H() self.update_G() self.update_F() # H值是和目标状态的距离之和 def update_H(self): # 用曼哈顿距离表示和目标的距离之和 x, y = self.x, self.y self.H = abs(x - target[0]) + abs(y - target[1]) # G值表示深度,即当前走的步数 def update_G(self): if self.pre: self.G = self.pre.G + 1 else: self.G = 0 # F是启发函数 F = G + H def update_F(self): self.F = self.G + self.H -
-
输出路径
# 输出路径 def get_path(self): nodes = [] node = self while node: nodes.append(node) node = node.pre res = [] for i in nodes[::-1]: res.append("(" + str(i.x) + "," + str(i.y) + ")") return res -
返回下一步可能所在的位置坐标
-
directions是我们自己定义的一个数组,用来快速向四个方向扩散directions = [[0, 1], [0, -1], [1, 0], [-1, 0]]
# 找到下一步可能所在的位置 def get_next_positions(self): next_positions = [] for i, j in directions: next_x = i + self.x next_y = j + self.y if next_x >= 0 and next_x < len(maze) and next_y >= 0 and next_y < len(maze[0]): if maze[next_x][next_y] == 0: next_positions.append([next_x, next_y]) return next_positions -
I/O相关
-
从文件中读取文本
def read_file(file_name): lines = [] with open(file_name, encoding="utf-8") as f: lines = f.readlines() return lines -
根据读取的文本生成迷宫
def get_maze(lines): matrix = [] for line in lines[2:]: line = line.strip() tmp = [int(i) for i in line.split(" ")] matrix.append(tmp) return matrix -
写文件
def write_file(file_name, lines): with open(file_name, 'w', encoding="utf-8") as f: for line in lines: f.write(str(line))
Astar搜索函数
根据算法描述转换成代码实现即可
def a_star(x0, y0):
open_list, close_list = [], []
# 初始化起点结点
node = Node(x0, y0)
open_list.append(node)
while open_list:
# 按照启发函数的值升序进行排列
open_list.sort(key = lambda x: x.F)
# 找到F值最小的结点,尝试扩展
cur_node = open_list[0]
# 确认是否是终点
if cur_node.H == 0:
print("wow, we find the path!")
return cur_node.get_path()
# 对当前这个F值最小的结点尝试搜索
open_list.pop(0)
close_list.append(cur_node)
# 获取下一步可能的位置
next_positions = cur_node.get_next_positions()
for next_position in next_positions:
x, y = next_position
# 把下一个位置初始化为一个结点next_node
next_node = Node(x, y)
# 把cur_node设置成next_node结点的父节点
next_node.pre = cur_node
# 更新一下F G H值
cur_node.update()
# 判断next_node在close_list和open_list中的情况
open_res = in_list(next_node, open_list)
close_res = in_list(next_node, close_list)
open_idx = open_res[1]
# 如果在close_list中说明已经检查完毕,跳过即可
if close_res[0]:
continue
# 如果在open_list中,需要判断是否更优
if open_res[0] and next_node.F < (open_list[open_idx]).F:
open_list[open_idx] = next_node
# next_node不在open_list也不在close_list中
if not open_res[0] and not close_res[0]:
open_list.append(next_node)
main函数
if __name__ == "__main__":
lines = read_file("Problem2.txt")
maze = get_maze(lines)
start, end = lines[0].rstrip(), lines[1].rstrip()
start = start.split(",")
end = end.split(",")
x0, y0, x1, y1 = int(start[0])-1, int(start[1])-1, int(end[0])-1, int(end[1])-1
target[0], target[1] = x1, y1
path = a_star(x0, y0)
lines = []
lines.append("共需" + str(len(path)) + "步\n")
lines.append("-".join(path))
write_file("Astar.txt", lines)
运行结果
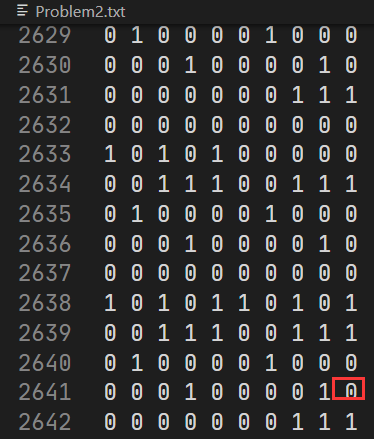
为了明显对比出两个启发函数的区别,我自己构造了一个2640*10的迷宫(没使用并查集,只是随便复制的)
- 起点1,1
- 终点2639,10,图中圈出来的那个
-
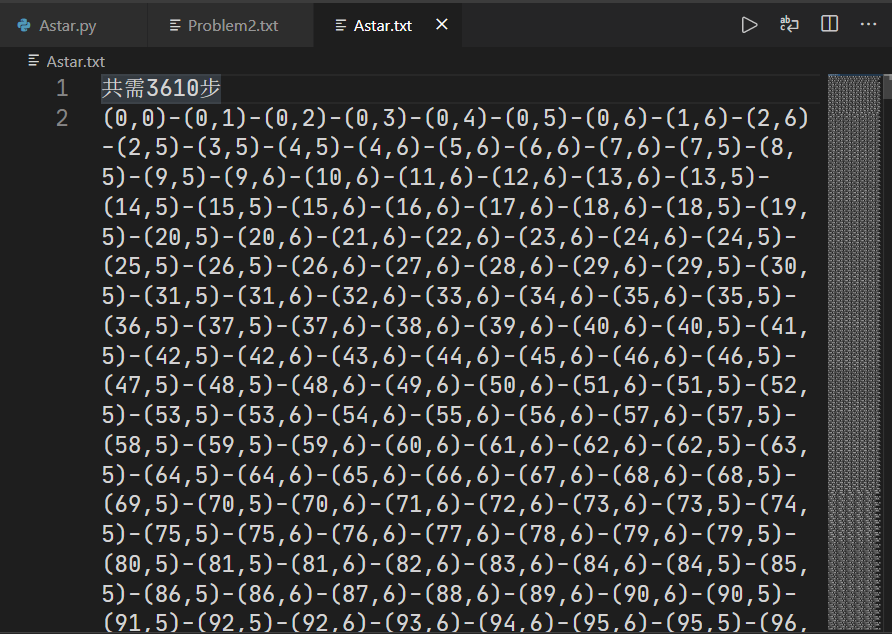
以曼哈顿距离作为启发函数

-
以欧式距离的平方作为启发函数

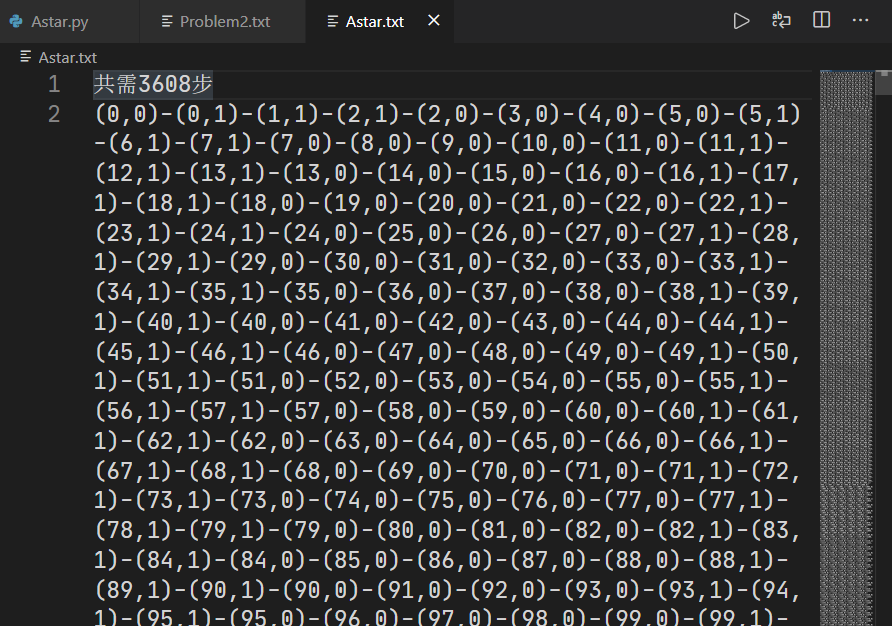
多次实验发现,在当前迷宫中,曼哈顿距离的启发函数花的时间远超欧氏距离的启发函数。
当然,这并不能直接的出哪个函数更优秀的结论,由于我本身只自定义了一个迷宫